人工智能 - CSPs 的现实世界示例
使用 CSP 算法解决旅行商问题
旅行商问题 (TSP) 是找到一条最短路径,该路径恰好经过每个城市一次并返回起始城市。作为一个约束满足问题,旅行商问题的变量、域和约束如下所示 −
变量: 图中的城市(节点)是变量。
域: 推销员访问的任意城市,除了已访问过的城市。
约束: 每个城市恰好被访问一次。旅行者返回起始城市,并使总旅行距离最小化。
回溯
回溯是一种深度搜索方法,用于为复杂问题找到解决方案。首先,我们按照约束逐步为变量从其域中赋值,如果发现约束被违反,则回退并为前面的变量尝试不同的值。
此代码利用 backtracking 找到有效路径,并根据以下约束决定最佳解决方案。
步骤 1:定义问题
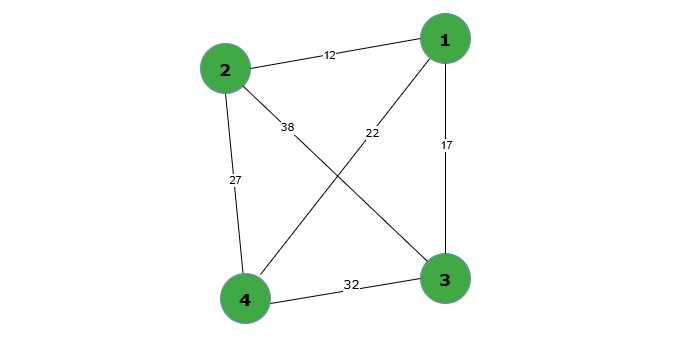
图以距离矩阵的形式表示。在此,graph[i][j] 表示城市 i 和城市 j 之间的距离。例如,如果 graph[0][1] = 12,则城市 1 和城市 2 之间的距离为 12 个单位。
这里,n 表示城市的总数,start_node 表示算法开始搜索可能路径的起始城市。这种结构可以视为解决 Constraint Satisfaction Problem (CSP) 方法的基本路径查找。
# 第一步是定义图,节点和边表示城市及其距离。 # 以距离矩阵形式表示的图 graph = [ [0, 12, 17, 22], # 来自节点 1 的距离 [12, 0, 27, 38], # 来自节点 2 的距离 [17, 27, 0, 32], # 来自节点 3 的距离 [22, 38, 32, 0] # 来自节点 4 的距离 ] n = len(graph) # 节点数量 start_node = 0 # 从节点 1(索引 0)开始
步骤 2:定义 TSP 求解器类
TSP 求解器使用 backtracking 探索所有可能路径并找到最优解。
图和 start_node 被存储,变量被初始化以跟踪 最佳路径 和 最小成本(best_path 和 min_cost)。
class TSP:
def __init__(self, graph, start_node):
self.graph = graph
self.start_node = start_node
self.best_path = None
self.min_cost = float('inf')
def solve(self):
visited = [False] * len(self.graph)
visited[self.start_node] = True
self.backtrack([self.start_node], 0, visited)
return self.best_path, self.min_cost
def backtrack(self, path, current_cost, visited):
# 基本情况:所有节点已被访问,返回起始节点
if len(path) == len(self.graph):
total_cost = current_cost + self.graph[path[-1]][self.start_node]
if total_cost < self.min_cost:
self.min_cost = total_cost
self.best_path = path + [self.start_node]
return
# 尝试所有可能的下一个节点
for next_node in range(len(self.graph)):
if not visited[next_node] and self.graph[path[-1]][next_node] > 0:
visited[next_node] = True
self.backtrack(path + [next_node], current_cost + self.graph[path[-1]][next_node], visited)
visited[next_node] = False
步骤 3:求解 TSP 问题
我们创建 TSP class 的一个实例并调用 solve 方法。
然后调用求解器(solve 方法)来计算最优路径和最小成本,从指定节点开始,使用回溯逻辑遍历图。
tsp = TSP(graph, start_node)
best_path, min_cost = tsp.solve()
# 输出结果
print("Optimal Path:", [node + 1 for node in best_path]) # 转换为 1-based 索引
print("Minimum Cost:", min_cost)
完整代码
旅行商问题 (TSP) 求解器的完整实现如下所示,它使用回溯来确定成本最低的最优路径。
# 以距离矩阵形式表示的图
graph = [
[0, 12, 17, 22],
[12, 0, 27, 38],
[17, 27, 0, 32],
[22, 38, 32, 0]
]
n = len(graph)
start_node = 0
class TSP:
def __init__(self, graph, start_node):
self.graph = graph
self.start_node = start_node
self.best_path = None
self.min_cost = float('inf')
def solve(self):
visited = [False] * len(self.graph)
visited[self.start_node] = True
self.backtrack([self.start_node], 0, visited)
return self.best_path, self.min_cost
def backtrack(self, path, current_cost, visited):
if len(path) == len(self.graph):
total_cost = current_cost + self.graph[path[-1]][self.start_node]
if total_cost < self.min_cost:
self.min_cost = total_cost
self.best_path = path + [self.start_node]
return
for next_node in range(len(self.graph)):
if not visited[next_node] and self.graph[path[-1]][next_node] > 0:
visited[next_node] = True
self.backtrack(path + [next_node], current_cost + self.graph[path[-1]][next_node], visited)
visited[next_node] = False
tsp = TSP(graph, start_node)
best_path, min_cost = tsp.solve()
# 输出结果
print("Optimal Path:", [node + 1 for node in best_path])
print("Minimum Cost:", min_cost)
以上代码的输出如下 −
Optimal Path: [1, 2, 3, 4, 1] Minimum Cost: 93